Greedy Best-First Search
Evaluation Func & Heuristic Func
- Evaluation func f(n)
- node n의 estimated cost
- Heuristic func h(n)
- node n에서 goal state로 가는 가장 저렴한 비용의 추정치
- root-finding problem에서 각 도시별 직선거리 함수
Greedy Best-First Search
- 정의: best-first search의 일종 → h(n) value가 가장 적은 노드를 확장
- table을 유지하는 경우 그래프 (중복을 고려)
- 없애는 경우 tree search (중복을 고려하지 않음)
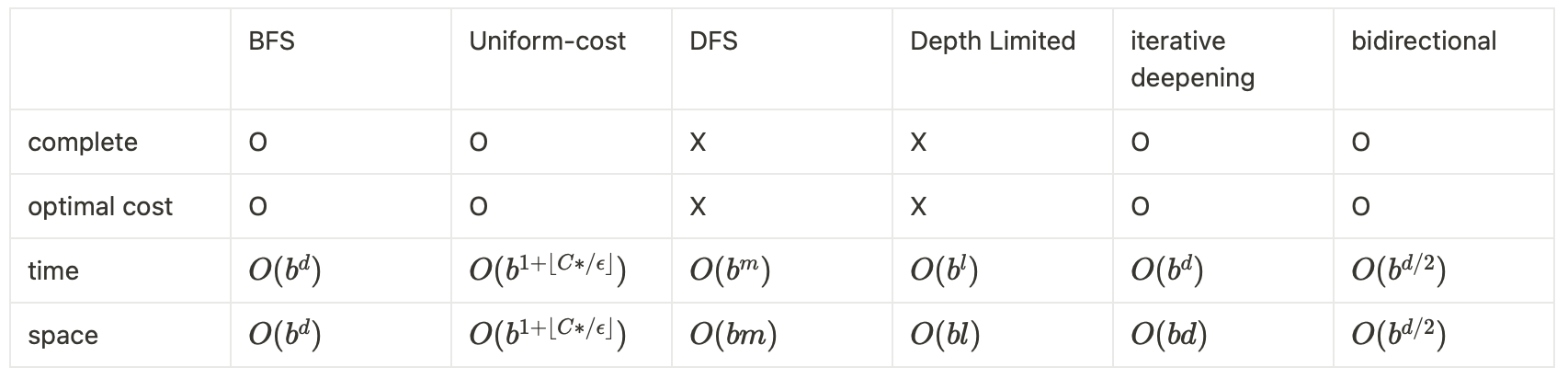
- 성능 평가
- Completeness → 사이클 발생
- Not complete: tree-like search
- complete: graph search
- Not cost-optimal
- Time Complexity: O(b^m)
- Space Complexity: O(b^m)
- Completeness → 사이클 발생
A* Search
- 정의: f(n) = g(n) + h(n)을 evaluation function으로 이용
- g(n): n까지 오는 데 비용
- h(n): n부터 goal까지 가는 데 추정되는 비용
- Admissible Heuristic Function
- goal에 도달하기 위한 비용을 절대 overestimate하지 않음
- h(n) <= h*(n) : h(n)은 실제 값
- admissible heuristic function을 이용한다면 A* search는 cost-optimal하다.
- Consistent Heuristic Function
- consistent: 모든 노드 n과 a라는 행동으로 생성된 자식 n’이 있을 때
- h(n) <= c(n,a,n') + h(n') 성립
- consistent heuristic function을 이용한다면 A* search는 cost-optimal하다 → 모든 consistent heuristic은 admissible하다.
- Search contours
- A*는 가장 적은 f-cost를 가진 frontier 노드를 확장하므로 등고선이 커지면서 cost가 점점 커지는 형태이다.
- 좋은 휴리스틱을 가졌다면, 등고선은 점점 goal state에 가까워질 것이며 최적 경로에 가까워질수록 더 좁아질 것이다.
- Optimally Efficient → C* : optimal cost
- surely expanded: f(n)<C*
- depends: f(n)=C*
- never expended: f(n) > C*
- Weighted A* Search
- 정의: C와 WC*사이의 cost를 가지는 해답을 찾는 것
- f(n)=g(n)+W*h(n)
- Suboptimal search techniques
- bounded suboptimal search: 실제 optimal cost의 1/2배 ..
- bounded-cost search: 실제 cost는 모르고 얼마 안에 도달하는 경로 찾기
- unbounded-cost search
- beam search: 메모리는 적게 유지 → 가장 좋은 score인 것만 유지하고 나머지는 가지치기
- 성능 평가
- Complete
- Cost-optimal
- Time-complexity <= O(b^d)
- Space complexity <= O(b^d)
Iterative-Deepening A* Search
- 정의 (IDA*)
- iterative deepening search + A* Search
- 이전 반복에서 cutoff를 초과하였던, f-cost가 가장 작은 임의의 노드를 cutoff → 기준보다 크지 않았다면 계속 내려감
- 특징
- f-cost가 모두 정수일 때 잘 작동
- f-cost가 모두 다른 노드일 때, 반복 숫자가 결국 state수와 같아질 수 있다.
Recursive Best-First Search
- 정의 (RBFS)
- recursive depth-first search + best-first search
- f-limit을 현재 노드가 초과한다면 다시 감아 내려가서 alternative path로 이동
- 진행 과정
- 일단 처음 limit = 무한대
- 다음 경로 중 가장 작은 cost인 쪽을 선택, limit은 두 번째로 가장 작은 값으로 변경
- 내려가서 limit과 cost의 값을 비교 → cost가 limit보다 크면 해당 cost를 limit으로 변경하고, limit과 같은 cost를 가졌던 node를 확인
- 성능 평가
- Complete
- Cost-optimal
- time complexity <= O(b^d)
- space complexity <= O(bd)
- 지나치게 적은 메모리 사용 → 계속 같은 state를 반복하여 탐색
Simplified Memory-Bounded A* Search
- 정의
- A* search를 메모리가 꽉 찰 때까지 진행
- 메모리가 꽉 찼다면 f-cost가 가장 큰 worst leaf node를 버림
- 잊어버린 노드의 값을 다시 부모에게 전달
- 성능 평가
- Complete
- Cost-optimal
- time complexity <= O(b^d)
- space complexity <= O(b^d)